“This next generation of robotics will benefit from pro-active policymaking and informed, ethical design,” argues Heather Knight in her new paper for the Brookings project on civilian robotics. In “How Humans Respond to Robots: Building Public Policy through Good Design,” Knight describes a series of important choices that humans face in designing robots that they will actually want to use and engage with, emphasizing that design considerations today can foreshadow policy choices in the future.
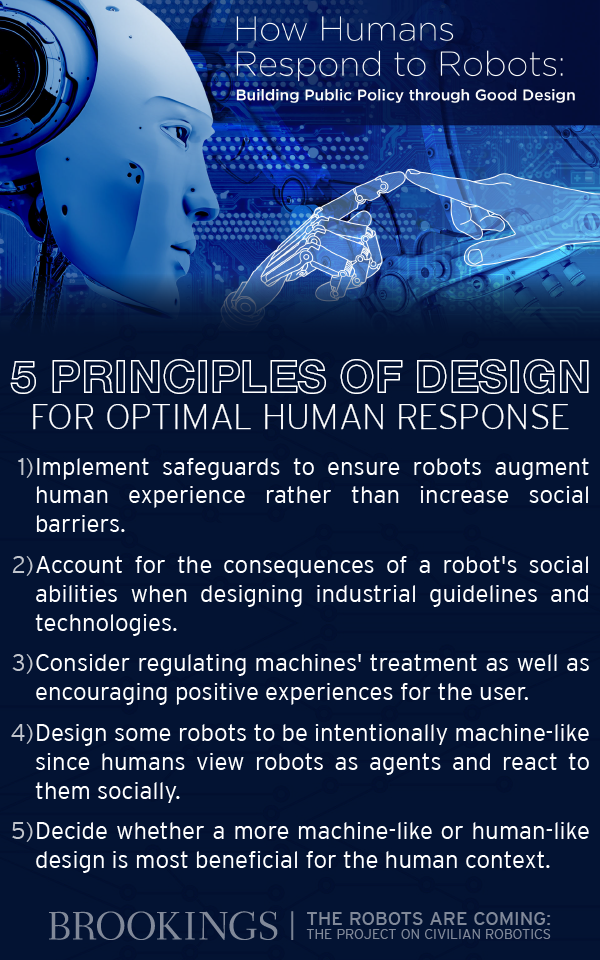
The chart below summarizes five principles of robot design for optimal human response that Knight discusses in her paper.
Knight emphasizes that a “bad social design can be difficult to interpret, or off-putting instead of engaging. One handy rubric referenced by robot designers for the latter is the Uncanny Valley.” See below:
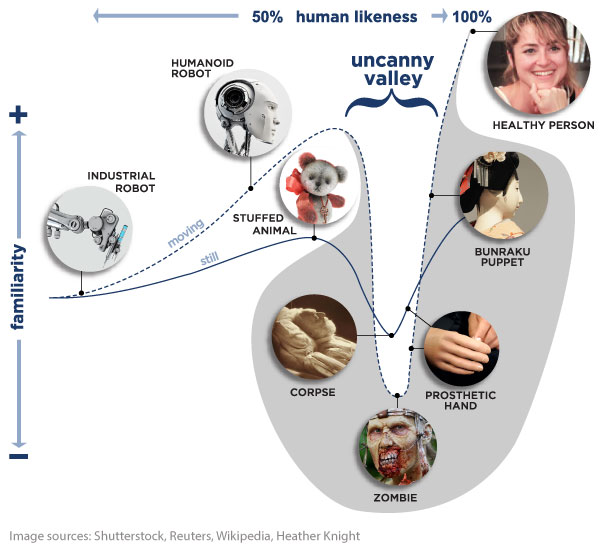
As Knight explains:
The concept [of the uncanny valley] is that making machines more humanlike is good up to a point, after which they become discomforting (creepy), until you achieve human likeness, which is the best design of all. The theoretical graph of the Uncanny Valley includes two lines, one curve for agents that are immobile (for example, a photograph of a dead person would be in the valley), and another curve with higher peaks and valleys for those that are moving (for example, a zombie is the moving version of that).
This paper is the second in the series, “The Robots Are Coming,” in which experts explore key policy, social, and economic issues in civilian robotics technology. The first was John Villasenor’s “Products Liability and Driverless Cars: Issues and Guiding Principles for Legislation.”
The Brookings Institution is committed to quality, independence, and impact.
We are supported by a diverse array of funders. In line with our values and policies, each Brookings publication represents the sole views of its author(s).


Commentary
The 5 Principles of Robot Design for Optimal Human Response
August 1, 2014